Simulating interconnections of systems
Sawyer B. Fuller 2023.03
This example creates a precise simulation of a sampled-data control system consisting of discrete-time controller(s) and continuous-time plant dynamics like the following. 
In many cases, it is sufficient to use a discretized model of your plant using a zero-order-hold for control design because it is exact at the sampling instants. However, a more complete simulation of your sampled-data feedback control system may be desired if you want to additionally
observe behavior that occurs between sampling instants,
model the effect of time delays,
simulate your controller operating with a nonlinear plant, which may not have an exact zero-order-hold discretization
Here, we include helper functions that can be used in conjunction with the Python Control Systems Library to create a simulation of such a closed-loop system, providing a Simulink-like interconnection system.
Our approach is to discretize all of the constituent systems, including the plant and controller(s) with a much shorter time step simulation_dt that we specify. With this, behavior that occurs between the sampling instants of our discrete-time controller can be observed.
[1]:
import numpy as np # arrays
import matplotlib.pyplot as plt # plots
%config InlineBackend.figure_format='retina' # high-res plots
import control as ct # control systems library
We will assume the controller is a discrete-time system of the form
![x[k+1] = f(x[k], u[k])](_images/math/536601b04a254efae17eb59b8415b7a4bf6e1175.png)
![~~~~~~~y[k]=g(x[k],u[k])](_images/math/115547f2ea59b41bf97c34405633f1b135740b86.png)
For this course we will primarily work with linear systems of the form
![x[k+1] = Ax[k]+Bu[k]](_images/math/8ef626c1360a755725adf7e10073ca4cb2a4abee.png)
![~~~~~~~y[k]=Cx[k]+Du[k]](_images/math/b57a8208c8d1bea9b511a895878bebe68c992080.png)
The plant is assumed to be continuous-time, of the form
 ,
, 
For this course, we will design our controller using a linearized model of the plant given by
 ,
, 
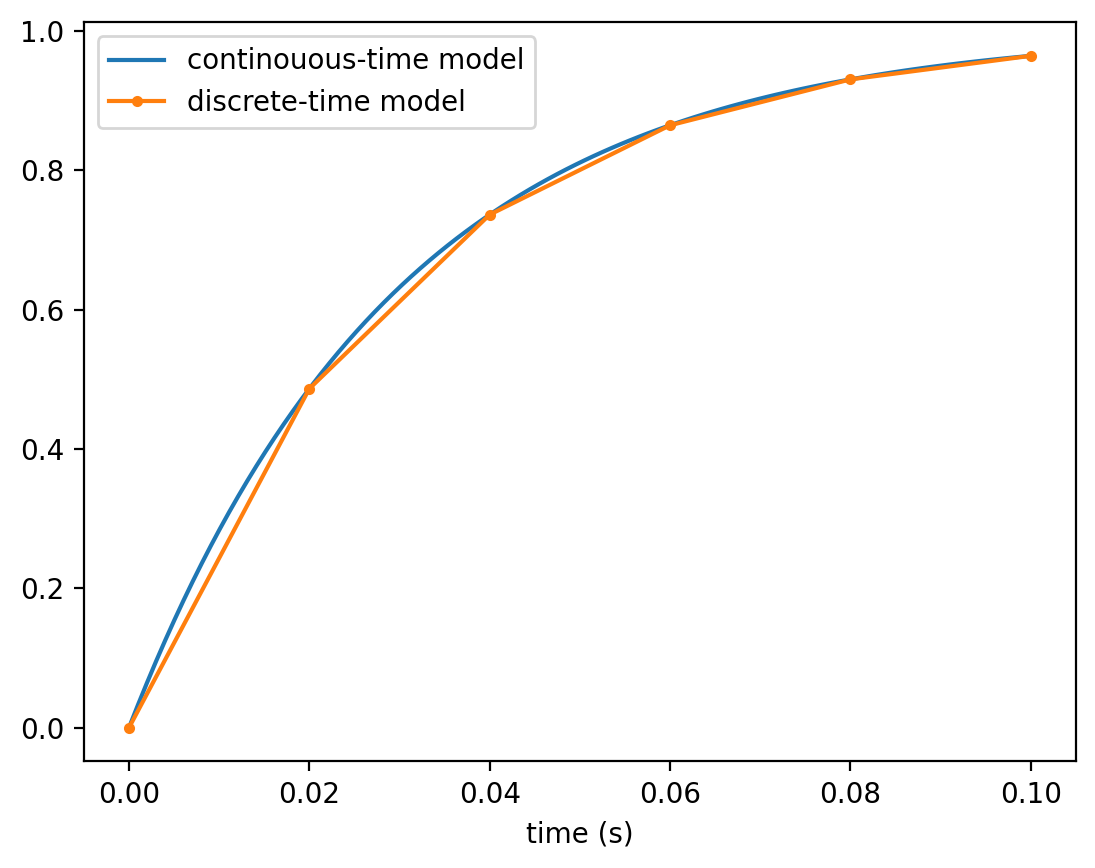
The first step to create our interconnected system is to create a discrete-time model of the plant, which uses the short time interval simulation_dt. Each subsystem gets signal names according to the diagram above, and we use interconnect to automatically connect signals of the same name.
[2]:
# continuous-time plant model
plantcont = ct.tf(1, (0.03, 1), inputs='u', outputs='y')
t, y = ct.step_response(plantcont, 0.1)
plt.plot(t, y, label='continouous-time model')
# create discrete-time simulation form assuming a zero-order hold
simulation_dt = 0.02 # time step for numerical simulation ("numerical integration")
plant_simulator = ct.c2d(plantcont, simulation_dt, 'zoh')
t, y = ct.step_response(plant_simulator, 0.1)
plt.plot(t, y, '.-', label='discrete-time model')
plt.legend()
plt.xlabel('time (s)');
Next we create a model of a sampled-data controller that operates as a nonlinear discrete-time system with a much shorter time step than the controller’s sampling time Ts.
[3]:
def sampled_data_controller(controller, plant_dt):
"""
Create a (discrete-time, non-linear) system that models the behavior
of a digital controller.
The system that is returned models the behavior of a sampled-data
controller, consisting of a sampler and a digital-to-analog converter.
The returned system is discrete-time, and its timebase `plant_dt` is
much smaller than the sampling interval of the controller,
`controller.dt`, to insure that continuous-time dynamics of the plant
are accurately simulated. This system must be interconnected
to a plant with the same dt. The controller's sampling period must be
greater than or equal to `plant_dt`, and an integral multiple of it.
The plant that is connected to it must be converted to a discrete-time
approximation with a sampling interval that is also `plant_dt`. A
controller that is a pure gain must have its `dt` specified (not None).
"""
assert ct.isdtime(controller, True), "controller must be discrete-time"
controller = ct.ss(controller) # convert to state-space if not already
# the following is used to ensure the number before '%' is a bit larger
one_plus_eps = 1 + np.finfo(float).eps
assert np.isclose(0, controller.dt*one_plus_eps % plant_dt), \
"plant_dt must be an integral multiple of the controller's dt"
nsteps = int(round(controller.dt / plant_dt))
step = 0
def updatefunction(t, x, u, params): # update if it is time to sample
nonlocal step
if step == 0:
x = controller._rhs(t, x, u)
step += 1
if step == nsteps:
step = 0
return x
y = np.zeros((controller.noutputs, 1))
def outputfunction(t, x, u, params): # update if it is time to sample
nonlocal y
if step == 0: # last time updatefunction was called was a sample time
y = controller._out(t, x, u)
return y
return ct.ss(updatefunction, outputfunction, dt=plant_dt,
name=controller.name, inputs=controller.input_labels,
outputs=controller.output_labels, states=controller.state_labels)
[4]:
# create discrete-time controller with some dynamics
controller_Ts = .1 # sampling interval of controller
controller = ct.tf(1, [1, -.9], controller_Ts, inputs='e', outputs='u')
# create model of controller with a much shorter sampling time for simulation
controller_simulator = sampled_data_controller(controller, simulation_dt)
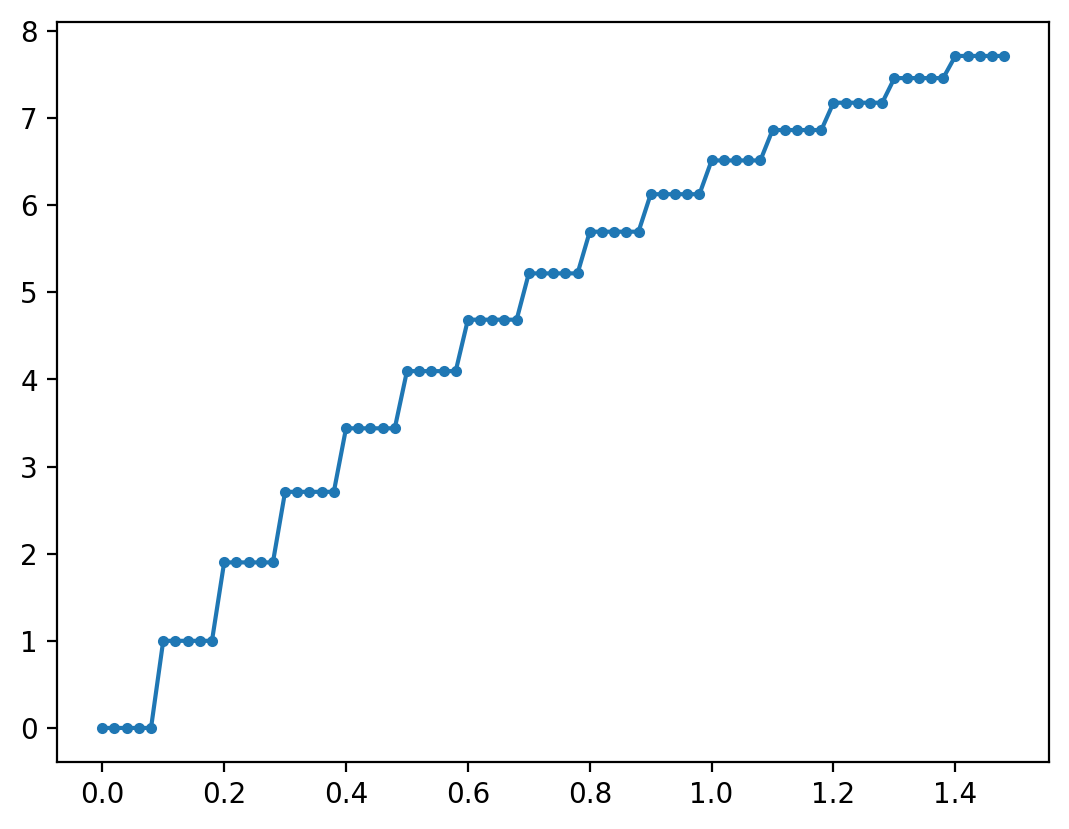
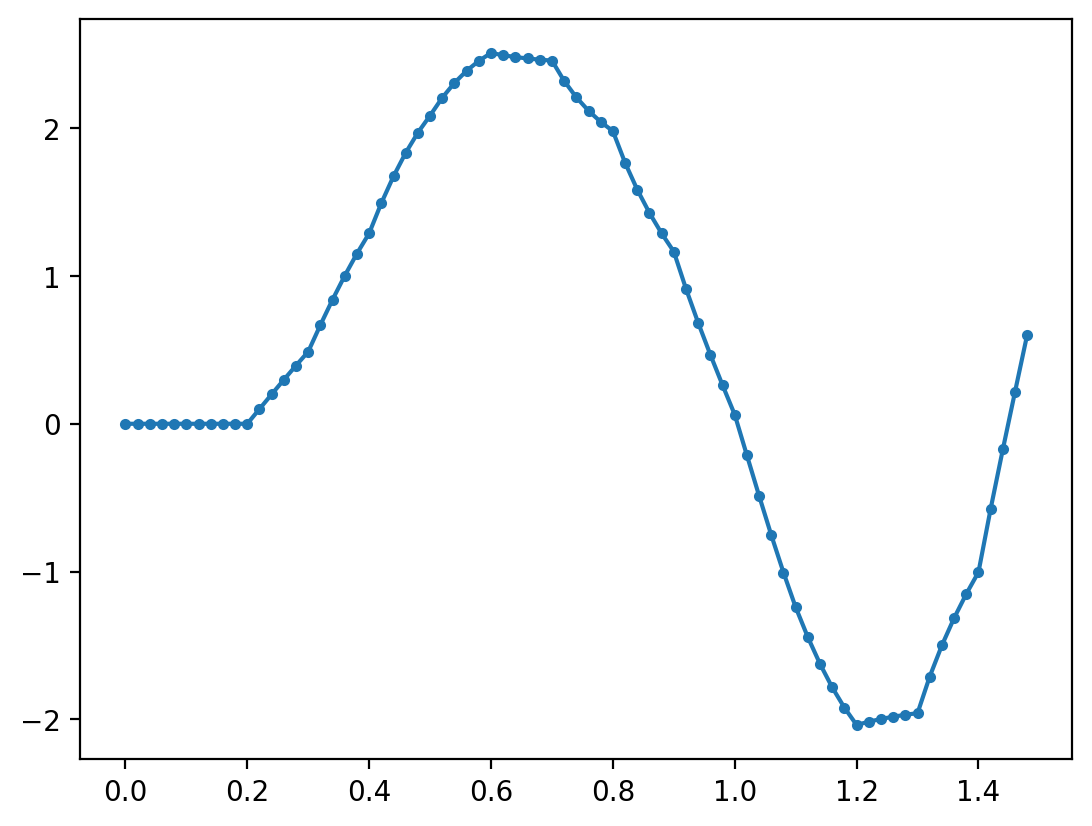
If the model is simulated with a short time step, its staircase output behavior can be observed. Because the controller model is nonlinear, we must use ct.input_output_response.
[5]:
time = np.arange(0, 1.5, simulation_dt)
step_input = np.ones_like(time)
t, y = ct.input_output_response(controller_simulator, time, step_input)
plt.plot(t, y, '.-');
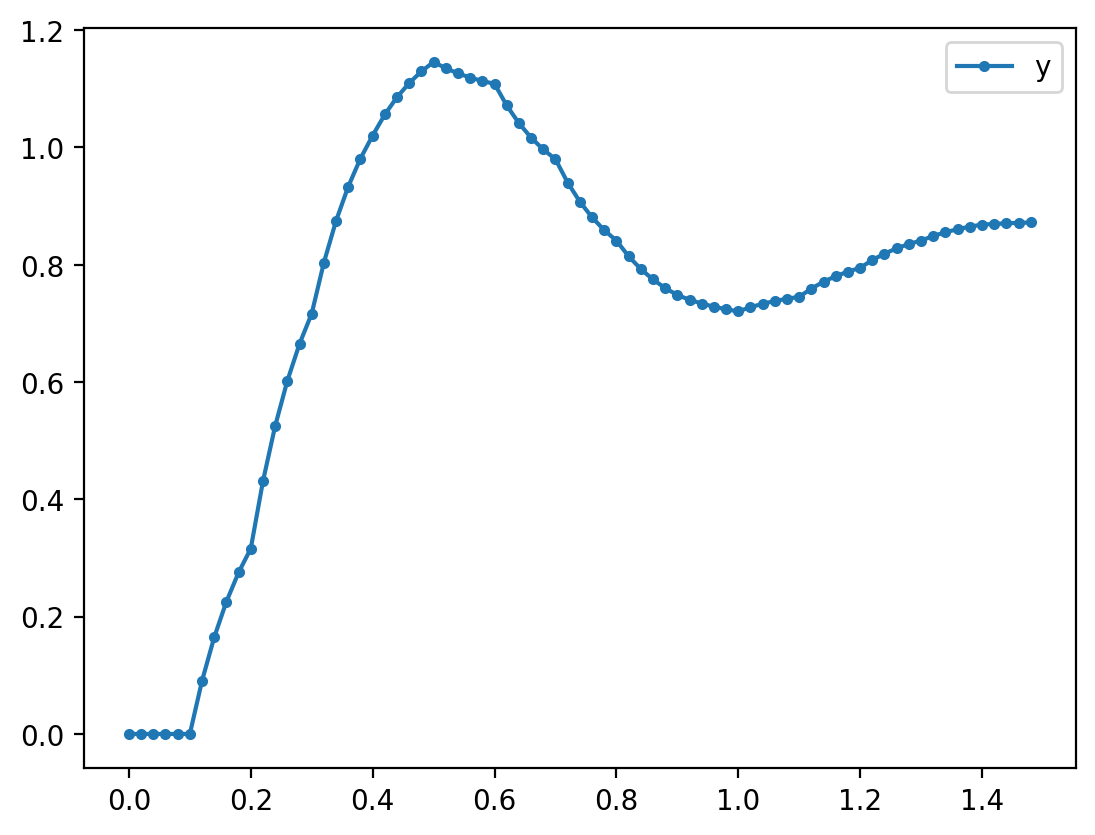
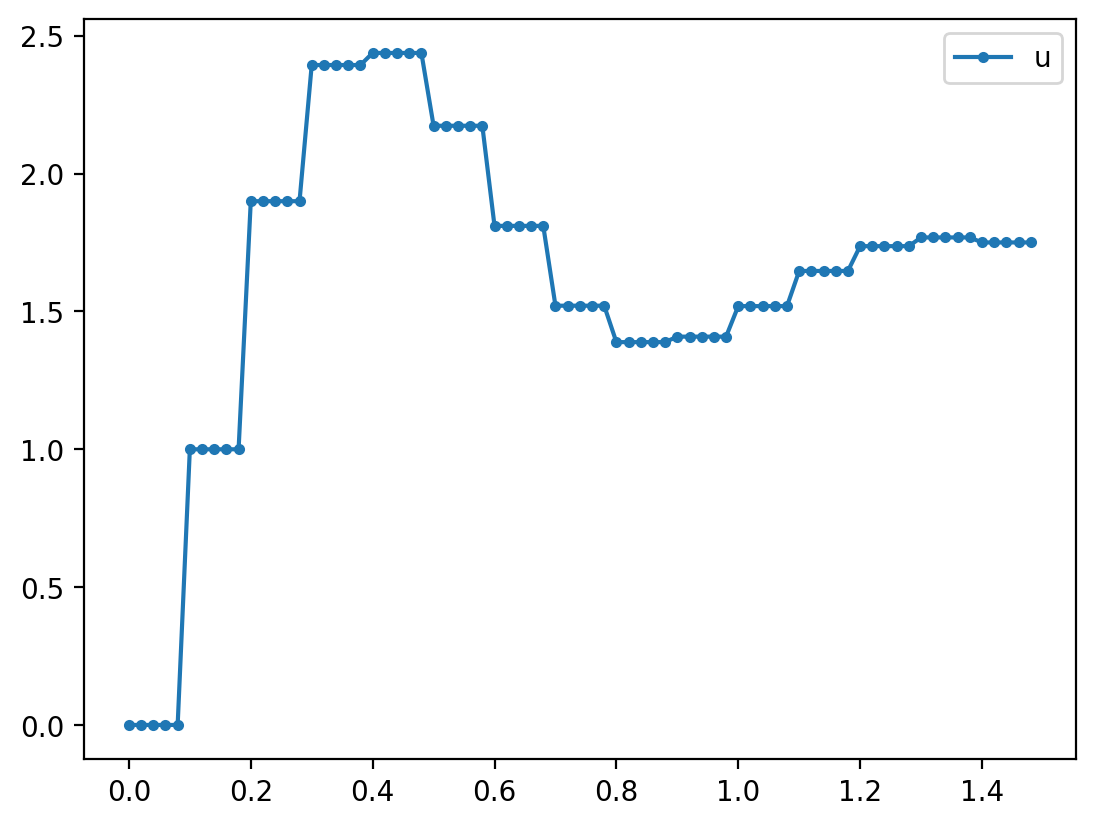
simulating a closed-loop system
Now we are able to construct a closed-loop simulation of the full sampled-data system.
[6]:
plantcont = ct.tf(.5, (0.1, 1), inputs='u', outputs='y')
u_summer = ct.summing_junction(inputs=['-y', 'r'], outputs='e')
plant_simulator = ct.c2d(plantcont, simulation_dt, 'zoh')
# system from r to y
Gyr_simulator = ct.interconnect([controller_simulator, plant_simulator, u_summer],
inputs='r', outputs=['y', 'u'])
# simulate
t, y = ct.input_output_response(Gyr_simulator, time, step_input)
y, u = y # extract respones
plt.plot(t, y, '.-', label='y')
plt.legend()
plt.figure()
plt.plot(t, u, '.-', label='u')
plt.legend();
time delays
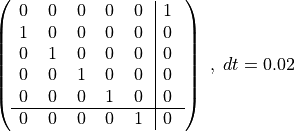
Given that all of the interconnected systems are being simulated in discrete-time with the same small time interval simulation_dt, we can construct a system that implements time delays by suitable choice of $A, B, C, $ and  matrices. For example, a 3-step delay has the form
matrices. For example, a 3-step delay has the form
![x[k+1] = \begin{bmatrix}0 & 0 & 0\\ 1 & 0 & 0\\ 0 & 1 & 0\end{bmatrix}x[k]+\begin{bmatrix}1\\0\\0\end{bmatrix}u[k]](_images/math/7218b8fb6c607e5f29c13cd3528b2d45f0a7bb02.png)
![~~~~~~~y[k]=\begin{bmatrix}0 & 0 & 1\end{bmatrix}x[k]](_images/math/a012fe8a0e278b6410bf29f9d498344372487d52.png)
The following function creates an arbitrarily-long time delay system, up to the nearest  .
.
[7]:
def time_delay_system(delay, dt, inputs=1, outputs=1, **kwargs):
"""
creates a pure time delay discrete-time system.
time delay is equal to nearest whole number of `dt`s."""
assert delay >= 0, "delay must be greater than or equal to zero"
n = int(round(delay/dt))
ninputs = inputs if isinstance(inputs, (int, float)) else len(inputs)
assert ninputs == 1, "only one input supported"
A = np.eye(n, k=-1)
B = np.eye(n, 1)
C = np.eye(1, n, k=n-1)
D = np.zeros((1,1))
return ct.ss(A, B, C, D, dt, inputs=inputs, outputs=outputs, **kwargs)
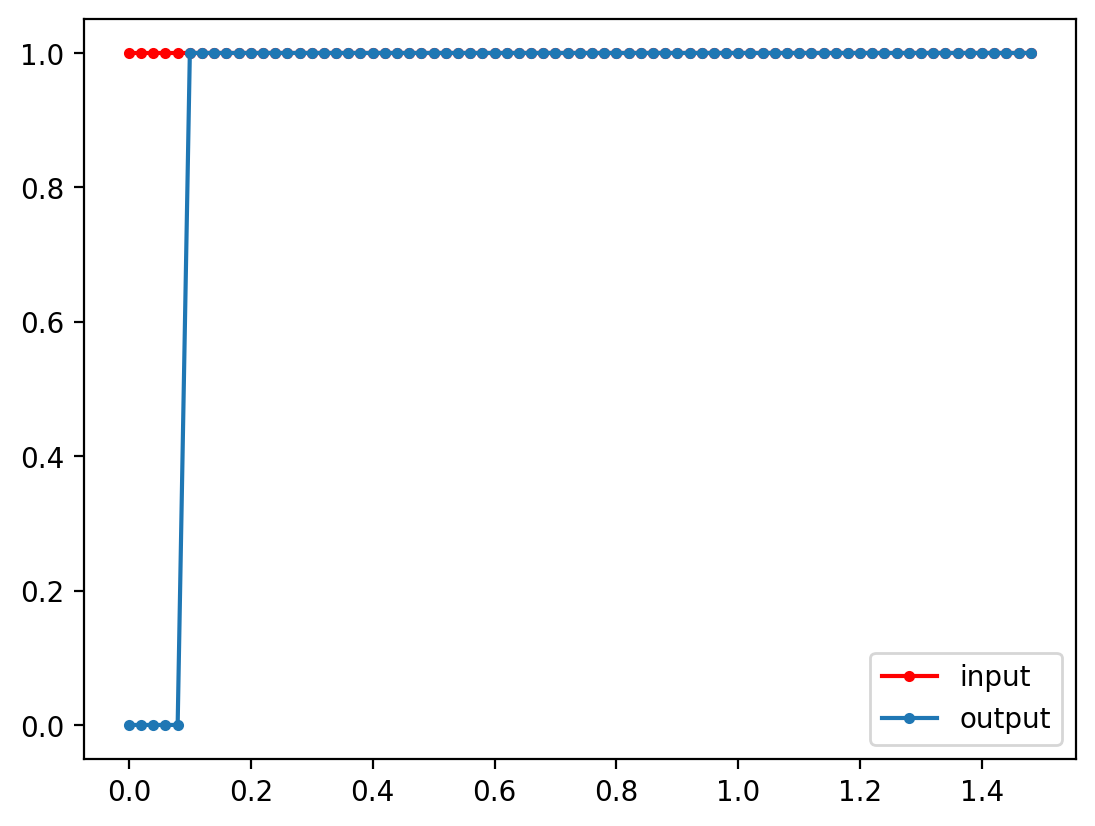
The step response of the time-delay system is shifted to the right.
[8]:
delayer = time_delay_system(.1, simulation_dt, inputs='u', outputs='ud')
t, y = ct.input_output_response(delayer, time, step_input)
plt.plot(time, step_input, 'r.-', label='input')
plt.plot(t, y, '.-', label='output')
plt.legend()
delayer
[8]:
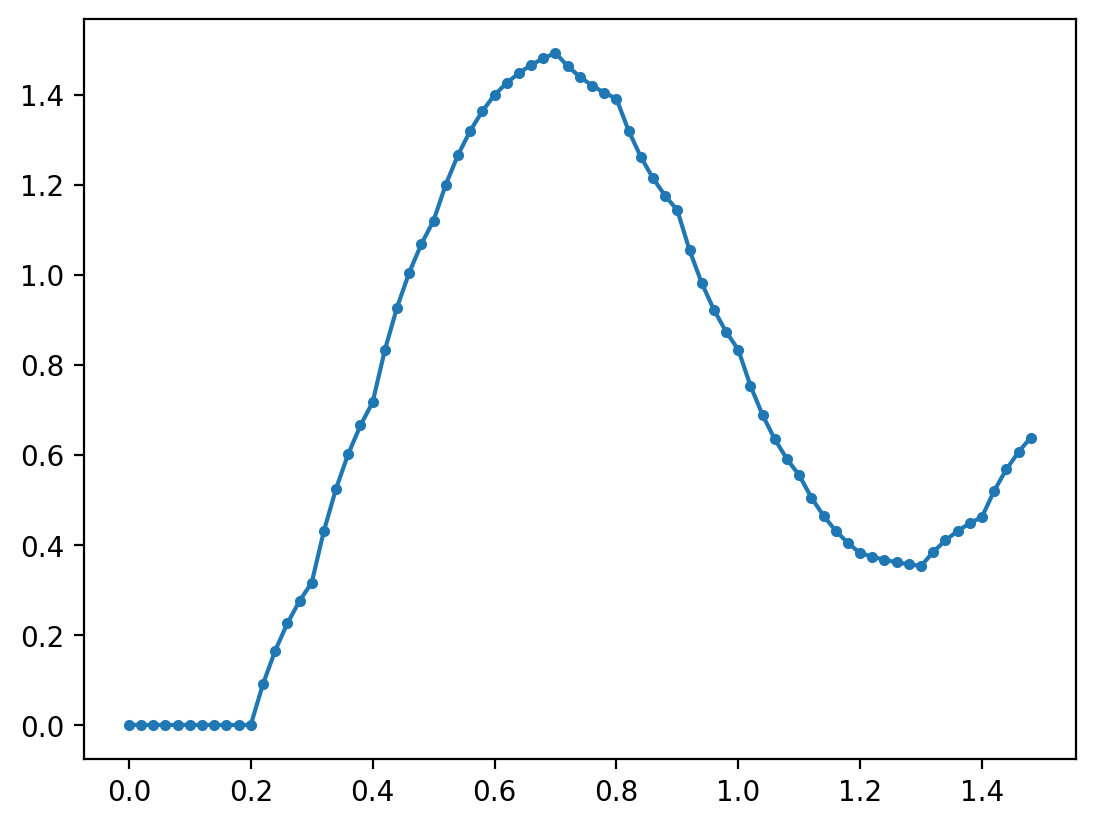
We can incorporate this delay into our closed-loop system. The time delay shifts the response to the right and brings the system closer to instability.
[9]:
# incorporate delay into system by relabeling plant input signal
plant_simulator = ct.ss(plant_simulator, inputs='ud', outputs='y')
# system from r to y
Gyr_simulator = ct.interconnect([controller_simulator, plant_simulator, u_summer, delayer],
inputs='r', outputs='y')
# simulate
t, y = ct.input_output_response(Gyr_simulator, time, step_input)
plt.plot(t, y, '.-');
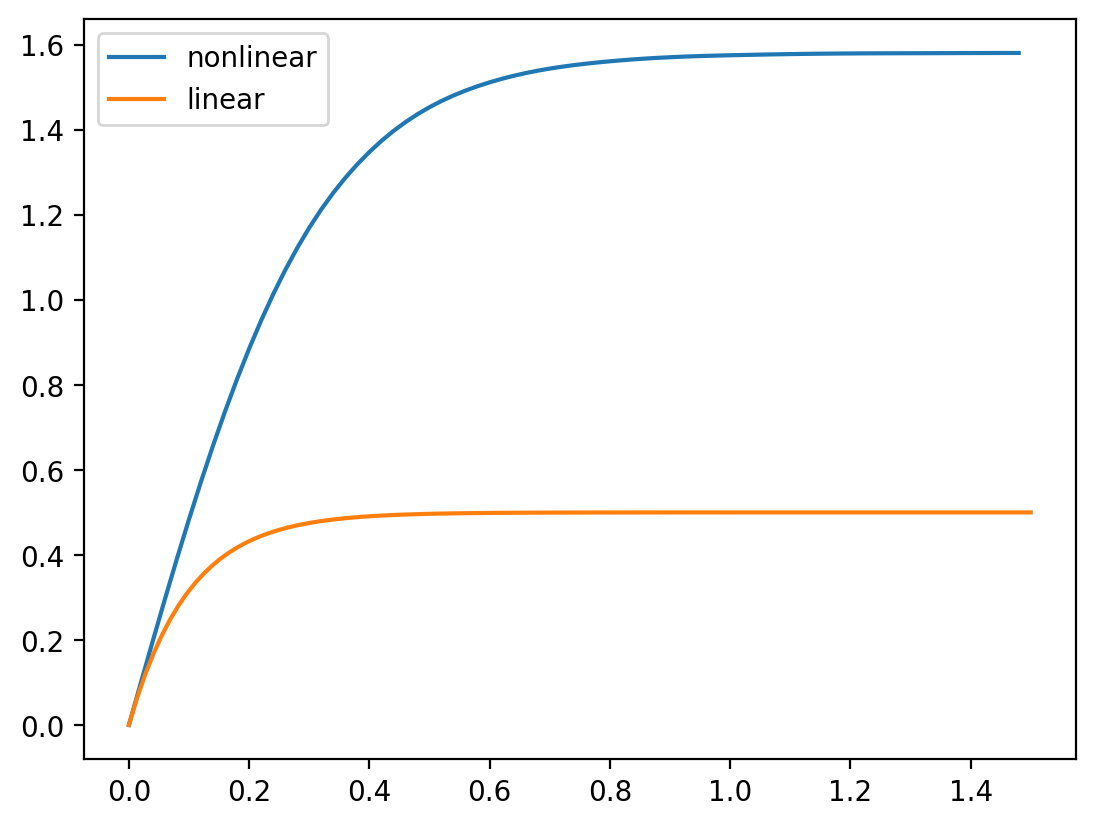
We can also observe how the dynamics behave with a nonlinear plant.
[10]:
def nonlinear_plant_dynamics(t, x, u, params):
return -10 * x * abs(x) + u
def nonlinear_plant_output(t, x, u, params):
return 5 * x
nonlinear_plant = ct.ss(nonlinear_plant_dynamics, nonlinear_plant_output,
inputs='ud', outputs='y', states=1)
# compare step responses
t, y = ct.input_output_response(nonlinear_plant, time, step_input)
plt.plot(t, y, label='nonlinear')
t, y = ct.step_response(plantcont, 1.5)
plt.plot(t, y, label='linear')
plt.legend();
now create a closed-loop system.
Note that this system is not intended to show operation of well-designed feedback control system.
[11]:
# create zero-order hold approximation of plant2 dynamics
def discrete_nonlinear_plant_dynamics(t, x, u, params):
return x + simulation_dt * nonlinear_plant_dynamics(t, x, u, params)
nonlinear_plant_simulator = ct.ss(discrete_nonlinear_plant_dynamics, nonlinear_plant_output,
dt=simulation_dt,
inputs='ud', outputs='y', states=1)
# system from r to y
nonlinear_Gyr_simulator = ct.interconnect([controller_simulator, nonlinear_plant_simulator, u_summer, delayer],
inputs='r', outputs=['y', 'u'])
# simulate
t, y = ct.input_output_response(nonlinear_Gyr_simulator, time, step_input)
plt.plot(t, y[0],'.-');
[ ]: